
Dual Magazine No. 10
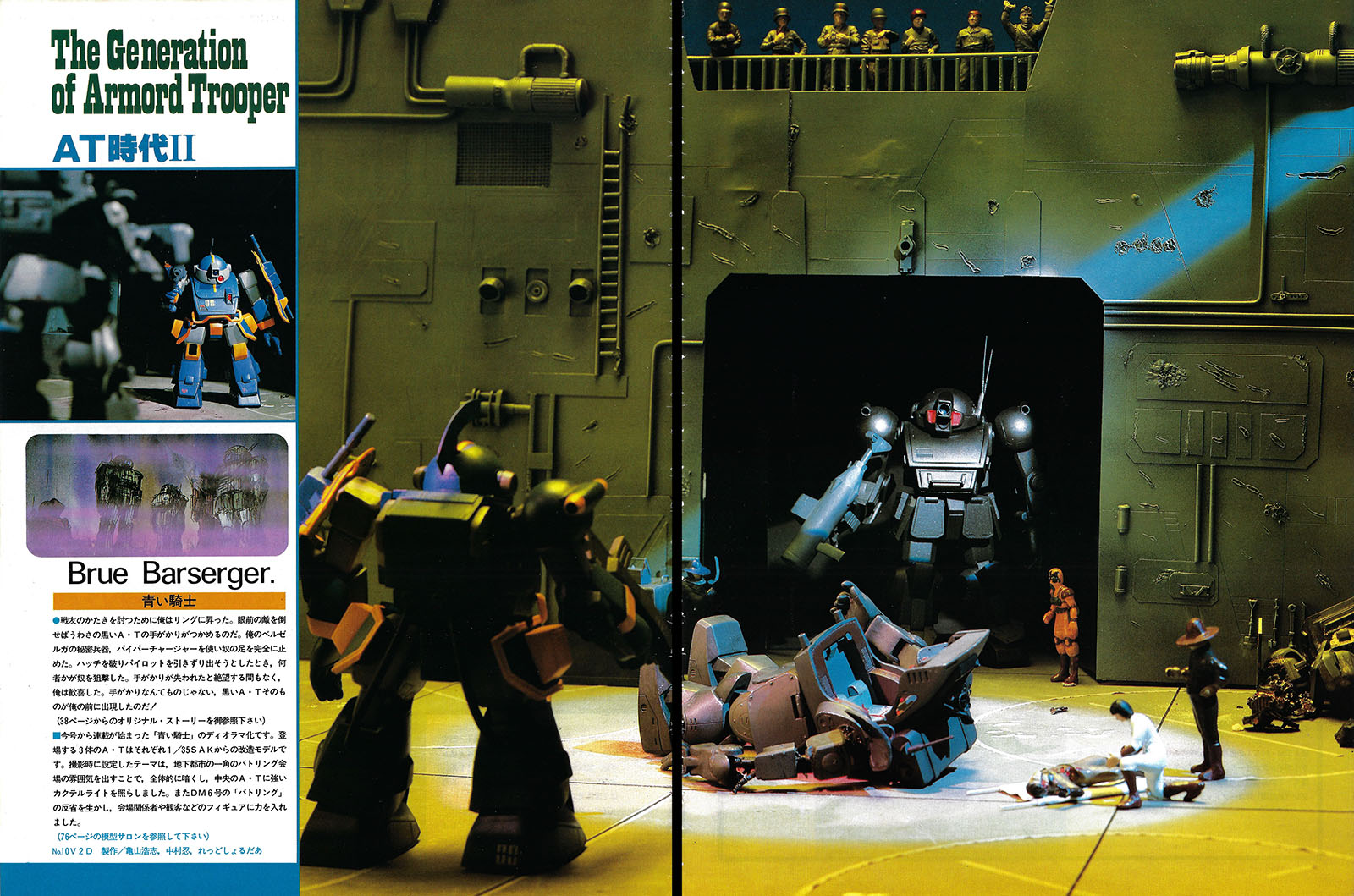
The Blue Knight
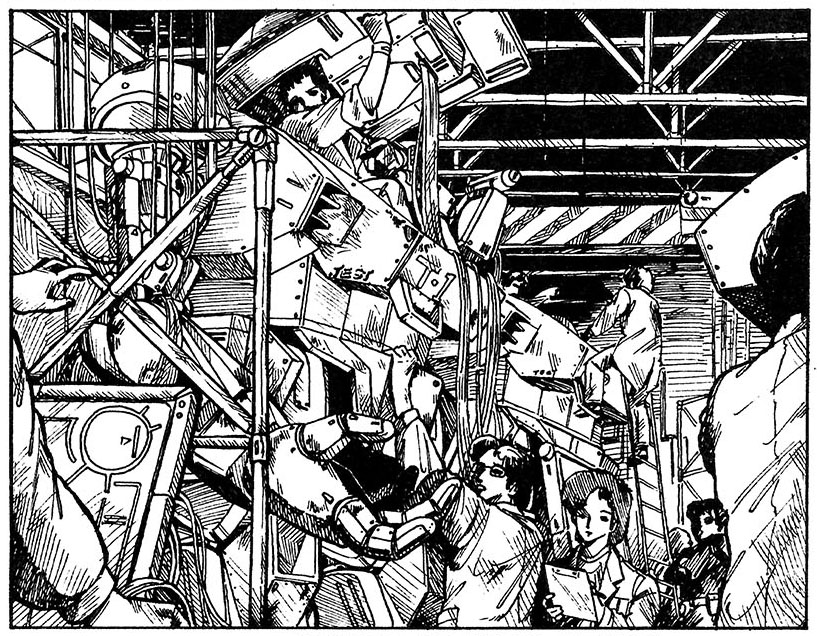
I ascended the ring to avenge the death of a comrade-in-arms. If I could defeat the enemy in front of me, I could find a clue to the rumored Black A.T. Using my Berserga’s secret weapon, the pipe charger, I stopped him dead in his tracks. As I was about to break through the hatch and pull the pilot out, someone sniped him. Before I could despair that the clue was lost, I rejoiced. It was not a clue, but the Black A.T. itself appeared in front of me!
(Please refer to the original story on page 38)
This is a diorama of Blue Knight, which starts serializing in this issue. Each of the three A.T. models in the series is a remodeled 1/35 Takara SAK. The theme was to create the atmosphere of a battling hall in a corner of an underground city. The entire scene was darkened and the A.T. in the center was illuminated by a strong cocktail light. Also, taking advantage of “Battling” in DM No. 6, we put a lot of effort into creating figures of venue personnel and audience members.
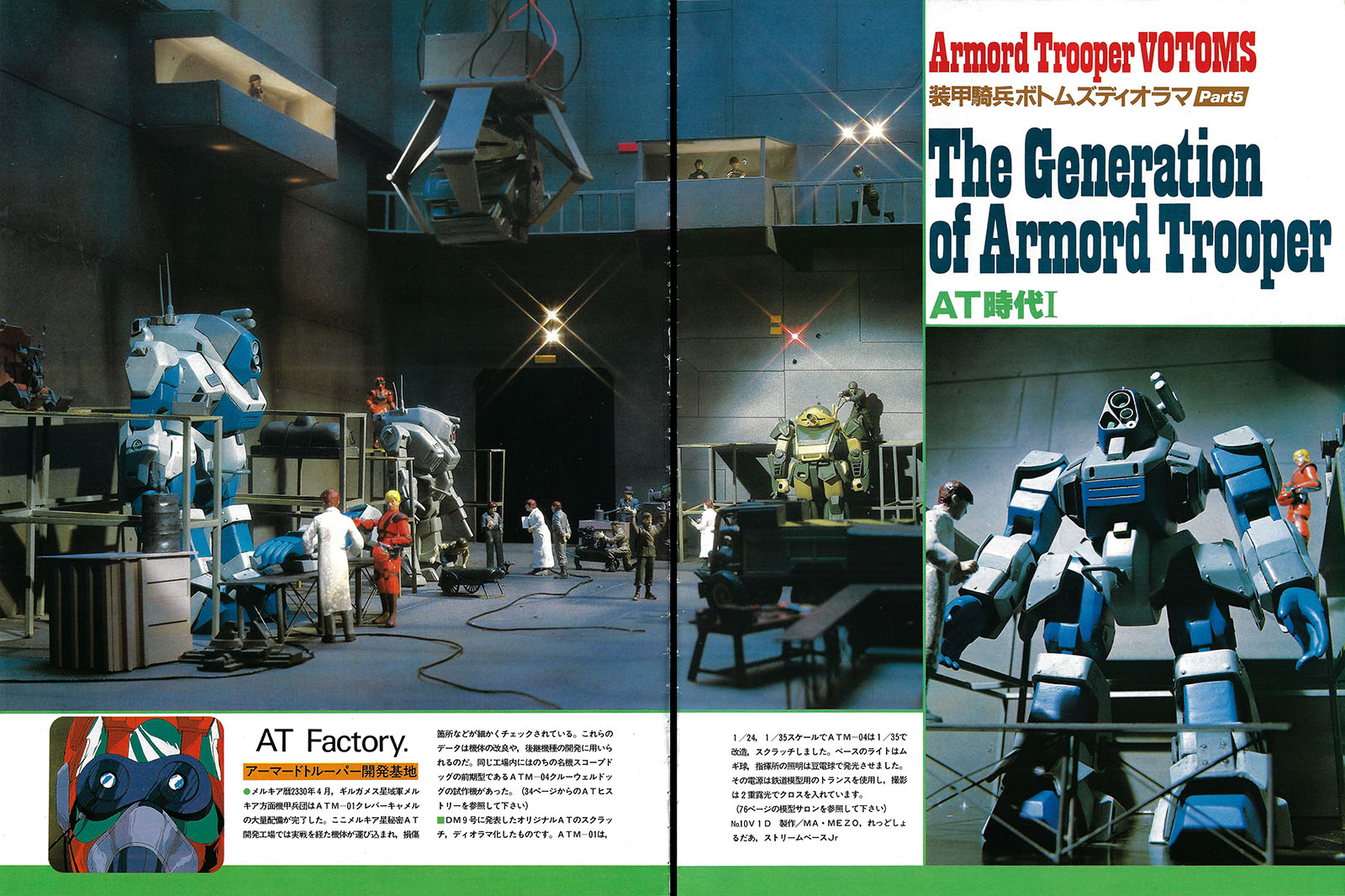
A.T. Factory
Armored Trooper development base
April 2330, Melkian calendar. The Melkia Armored Corps of the Gilgameth Galactic Army completed mass deployment of the ATM-01 Clever Camel. Here at the secret A.T. development factory on the planet Melkia, mecha that has been in actual combat is brought in and the damaged parts are checked in detail. This data is used to improve the machine and to develop successor models. In the same factory, there is a prototype of the ATM-04 Cruel Dog, an early model of the later famous Scopedog.
(See A.T. history on page 34)
This is a scratch and diorama version of the original A.T. published in DM No. 9. ATM-01 was modified and scratched at 1/24 and 1/35 scale, and ATM-04 at 1/35 scale. The lights of the base sre wheat bulbs, and the light of the command post is a miniature light bulb. The power supply is a transformer for model trains.
Production: MA-MEZO, Red Shoulder, Stream Base Jr.

DM Model Showroom 1
Original A.T. Series
We changed this feature from the Okawara design room. From here onward, the corner will be used to introduce mechanisms and models that appear in various works. Thank you for your continued support. In this first issue, we would like to introduce mecha design models announced in the original A.T. series.

This custom type is based on the Quent A.T. and has been modified specifically for fighting. It is named “Battling Special.” The modification points include the addition of a roll bar for combat use, enhanced pile bunker, and improved sensors. (Please refer to Blue Knight on page 38)
It was converted from a 1/35 SAK Berserga as a base. The additional parts were assembled with plastic and molded with putty. A mobile spring was used for the power pipe in the chest.
Design by Kunio Okawara, design arrangement by Kazumi Fujita
Modeled by Shinobu Nakamura
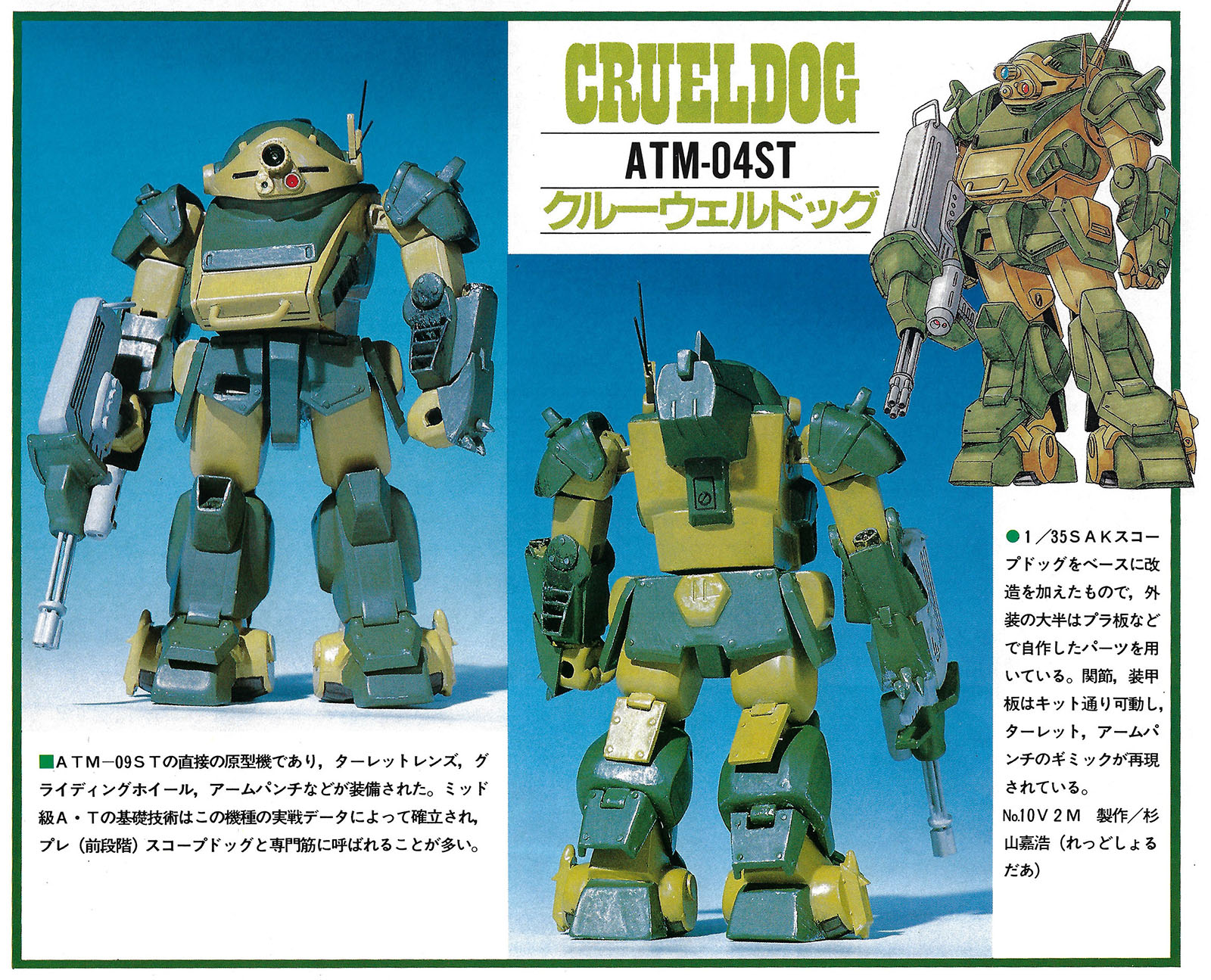
This is a direct prototype of the ATM-09ST. It was equipped with turret lens, gliding wheel, arm punch, etc. The basic technology of the mid-class A.T. was established by the actual battle data of this model. It is often called a “pre-Scopedog” by specialists.
It is based on 1/35 SAK Scopedog with some modifications. Most of the exterior parts are made by hand in plastic and other materials. The joints and armor plates are movable as in the kit, and the turret and arm punch gimmicks are reproduced.
Design Kunio Okawara, design arrangement by Kazumi Fujita
Modeled by Yoshihiro Yama (Red Shoulder)

This was the first mid-class A.T. of the Gilgameth Army and was highly versatile, characterized by its advanced sensor systems designed for space battle. The current A.T. has simplified sensor devices dispersed throughout the body. This sensor-intensive design is considered obsolete.
Although this is a full scratch model, the joints of 1/24 SAK Scopedog were used, and all joints are movable. The head sensor was designed to open and close, but it was not completed due to time constraints.
Designed by Kazumi Fujita
Modeled by Atsuhiko Eguchi (Red Shoulder)

A.T. Mechanism History III
A.T. Classification
Written by the editorial department
Illustrated by Kazumi Fujita
The A.T. Mechanism History has finally reached its third installment, and the title is now The Generation of Armored Trooper. Please continue to support it, now under the nickname “GAT.”
In the previous editions of GAT, we covered the birth of the Machine Trooper (M.T.), the development of the Armored Trooper (hereafter abbreviated as A.T.), and the differentiation of the A.T. into the mid- class. The heavy-class A.T. was demoted as the main weapon on the battlefield due to the mobility of the mid-class. This time we follow its return to the battlefield with the development of the PRSP pack. In this period, localized warfare was progressing, and the A.T. that responded to this trend will also be traced.
The Generation of AH-06ST
From the beginning of development, the ATH-06ST was required to have a high level of accuracy in various areas of mid-class A.T. or higher. Therefore, the accuracy of the arm manipulator and arm punch mechanism were carefully developed. The illustration shows a test scene after the third modification of the manipulator drive system.
At right: ATH-06ST Standing Beetle
With the completion of the ATM-01, all other A.T.s were classified as heavy class. However, the ATH-06ST was the first A.T. to be substantially developed as a heavy class. Therefore, the ATH-06ST was destined to include something in its development concept that would make it superior to the mid-class A.T., which was becoming the mainstay of the battlefield due to its mobility.
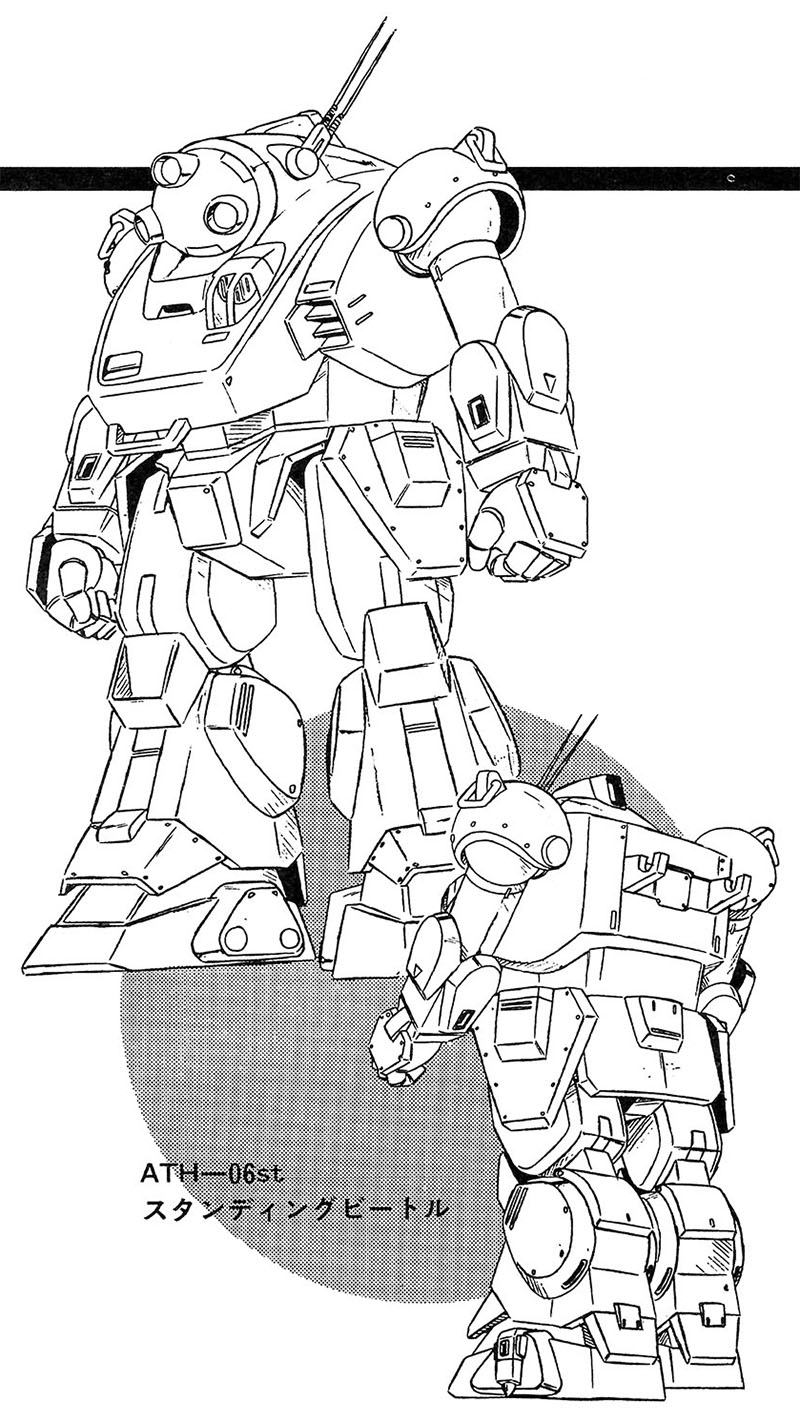
The development team focused on the enhancement of various functions: a highly accurate manipulator that could withstand arm punch, and enhancement of the gliding wheel’s output to ensure driving stability. The technology developed in these efforts was so complete that it was later used in the ATM-09.
However, because they used a different variation of the MC (Muscle Cylinder), which had almost reached a stage of perfection, it led to a lower evaluation. In other words, it was inferior to the mid-class in terms of dynamic performance and mobility. From this point, development of the PRSP (Polymer Ringer Solution Pack) began; a sub-unit which improved the performance of the MC without changing it. The ATH-06WP (Diving Beetle), which added a PRSP to the ATH-06ST and improved the accuracy of various functions, was released later.
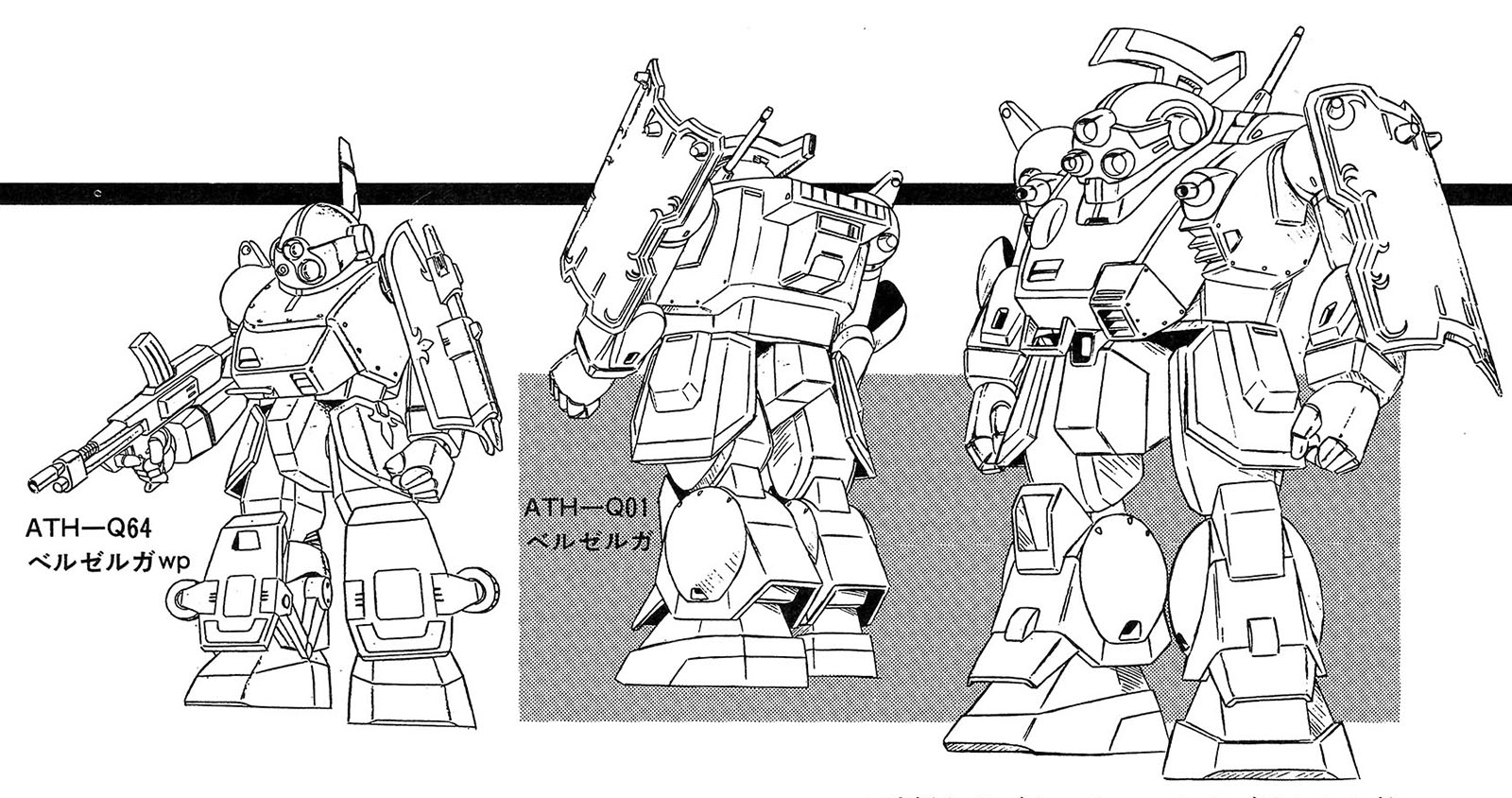
Additionally, the ATH-06ST was equipped with sensors using Quent cables, which had appeared on the ATH-Q01. Similarly, ATH-Q64 Berserga WP was developed by modifying the ATH-06WP.
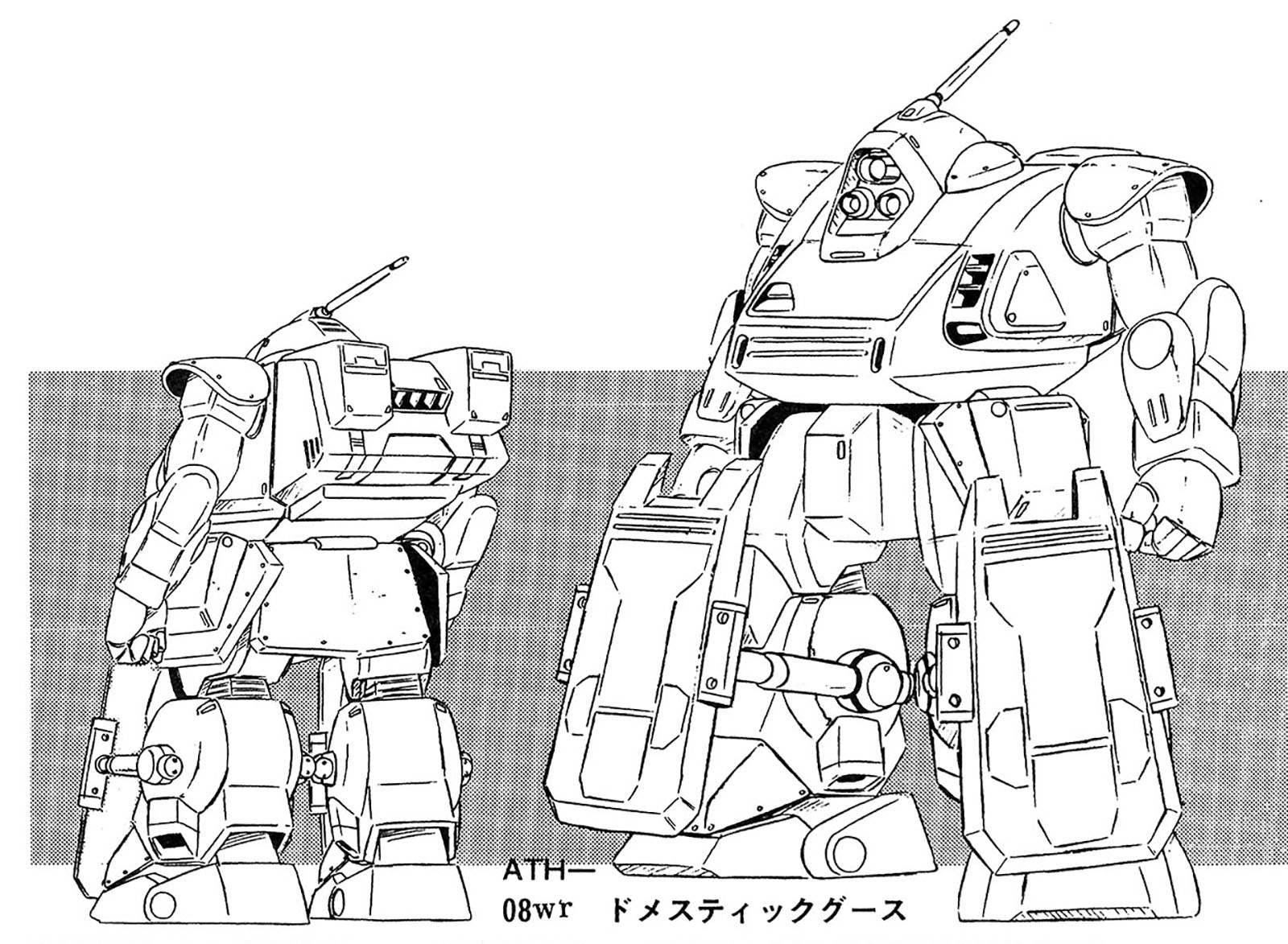
ATH-08WR Domestic Goose
The Generation of ATH-08WR
A sub-unit proposed with ATH-06ST, this A.T. was equipped with a PRSP installed to support a high-output MC. The basic details are the same as ATH-06ST. This is the ATH-08ST. The PRSP pack is an expansion pack with a built-in purification system for Polymer Ringer fluid in the MC.
At this time, the Third Galactic War was gradually shifting from interplanetary war to local warfare. A.T.s with specifications for local warfare were required. Therefore, the ATM-09ST and ATH-08ST, which were highly complete and versatile, were modified into wetland warfare types. These were ATM-09WR and ATH-08WR (WR = Water Resistant). However, even though they were designed for wetland warfare, they were not completely waterproof. They were equipped with an A.T. floatation bag (air barge), and had minor part modifications.
The main specifications of the ATH-08WR match the upper body of the ATH-08ST with a waterproof lower body. It uses swamp clogs with gliding wheels removed.
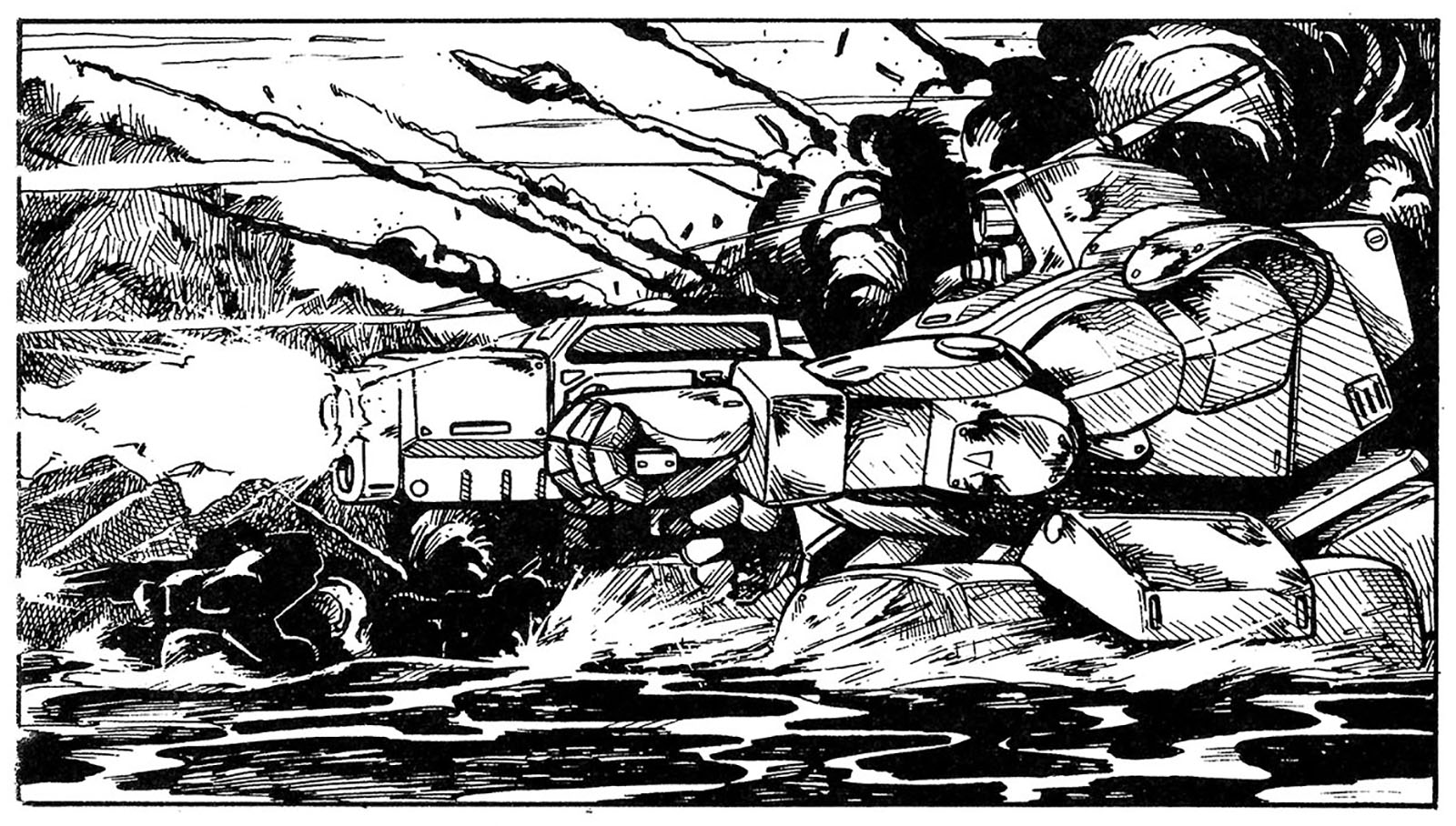
ATH-08WR in water combat
The WR-type ATH-08 cannot operate underwater, so it could not be used at depths greater than waist level. It maximized the buoyancy of the air barge to raise the upper body to the surface for combat operations. Hydro-jets on the sides of both legs were used for moving and also to maintain a fixed point as in the case of ATM-09WR.
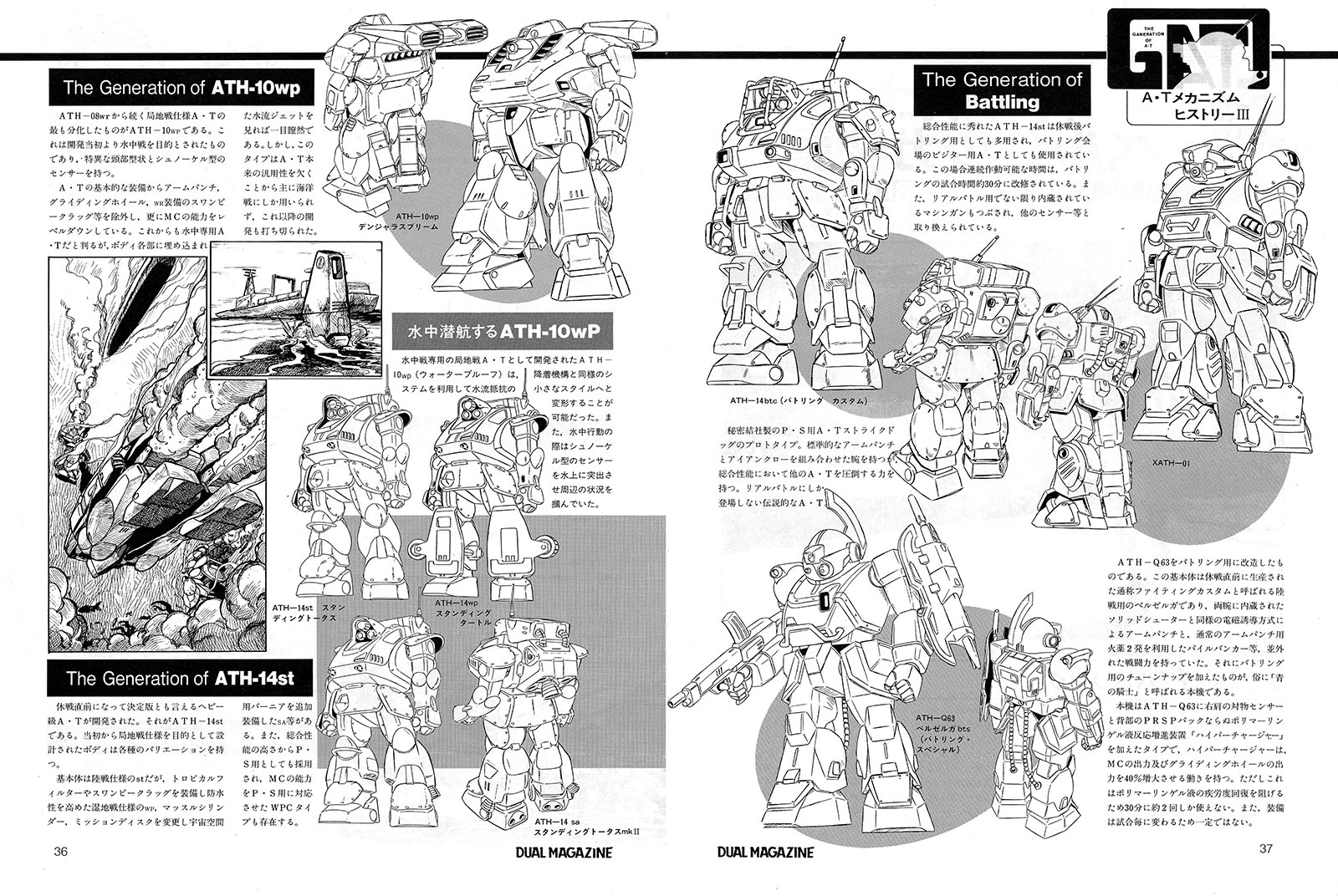
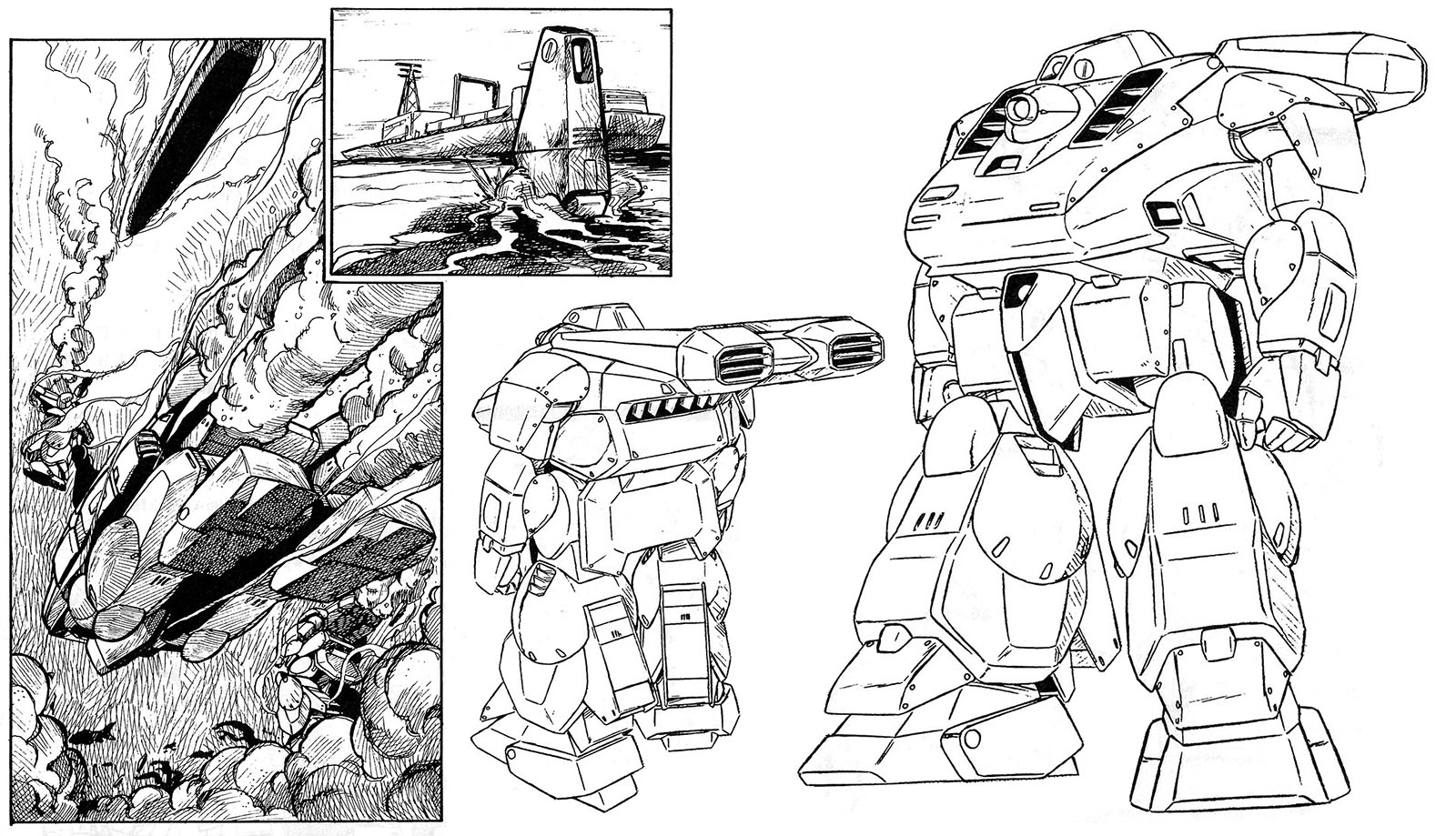
The Generation of ATH-10WP
The ATH-10WP, developed after the ATH-08WR, was the most differentiated version of the local warfare A.T. It was designed for underwater warfare from the beginning of its development. It had a unique head shape and snorkel-type sensor. Apart from the basic equipment of arm punch and gliding wheel, WR swamp clogs were excluded and the MC’s capabilities were downgraded. Clearly, this was an A.T. for underwater use only, as evidenced by the water flow jets embedded in each part of the body.
However, this type of A.T. lacked its original versatility, and was used mainly only for maritime warfare. The development of subsequent types was also discontinued.
Submersible ATH-10WP
The ATH-10WP (Water Proof), developed as a local warfare A.T. exclusively for underwater warfare, was capable of transforming into a style with low water-flow resistance by using a system similar to that of a landing mechanism. When the A.T. was in the water, a snorkel-type sensor protruded above the surface to grasp the surrounding situation.
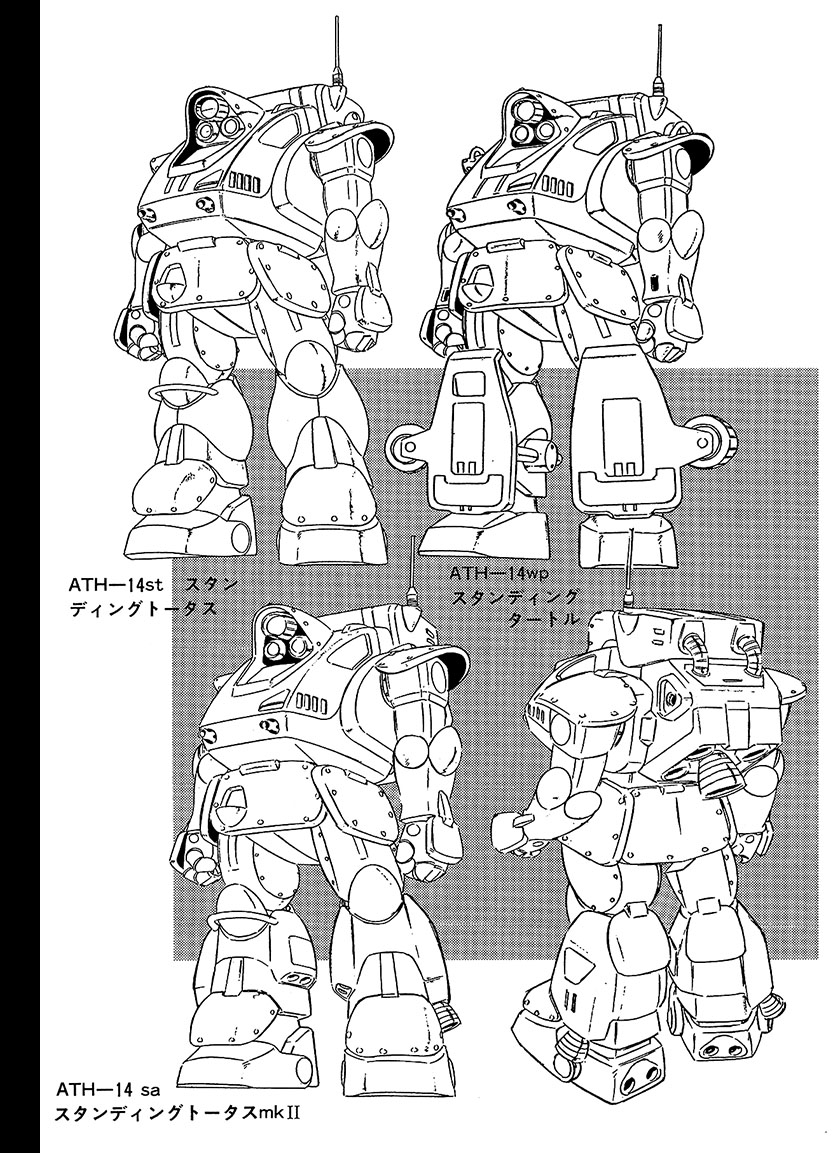
The Generation of ATH-14ST
Just before the armistice, a heavy class A.T. was developed which could be called the definitive version: the ATH-14ST. The body, which was originally designed for local warfare, has several variations.
The main body was a land battle specification ST, but it was could also be equipped with a tropical filter and swamp clogs for improved waterproofing in wetland battle specs. The SA (Space Assault) variation included modified muscle cylinders, a modified mission disc and verniers for outer space, and so on.
It was adopted for P.S. use because of its high overall performance, and a WPC type with M.C. capability also existed for P.S. use.
Top: Standing Tortoise, Standing Turtle.
Bottom: Standing Tortoise Mark II.
The Generation of Battling
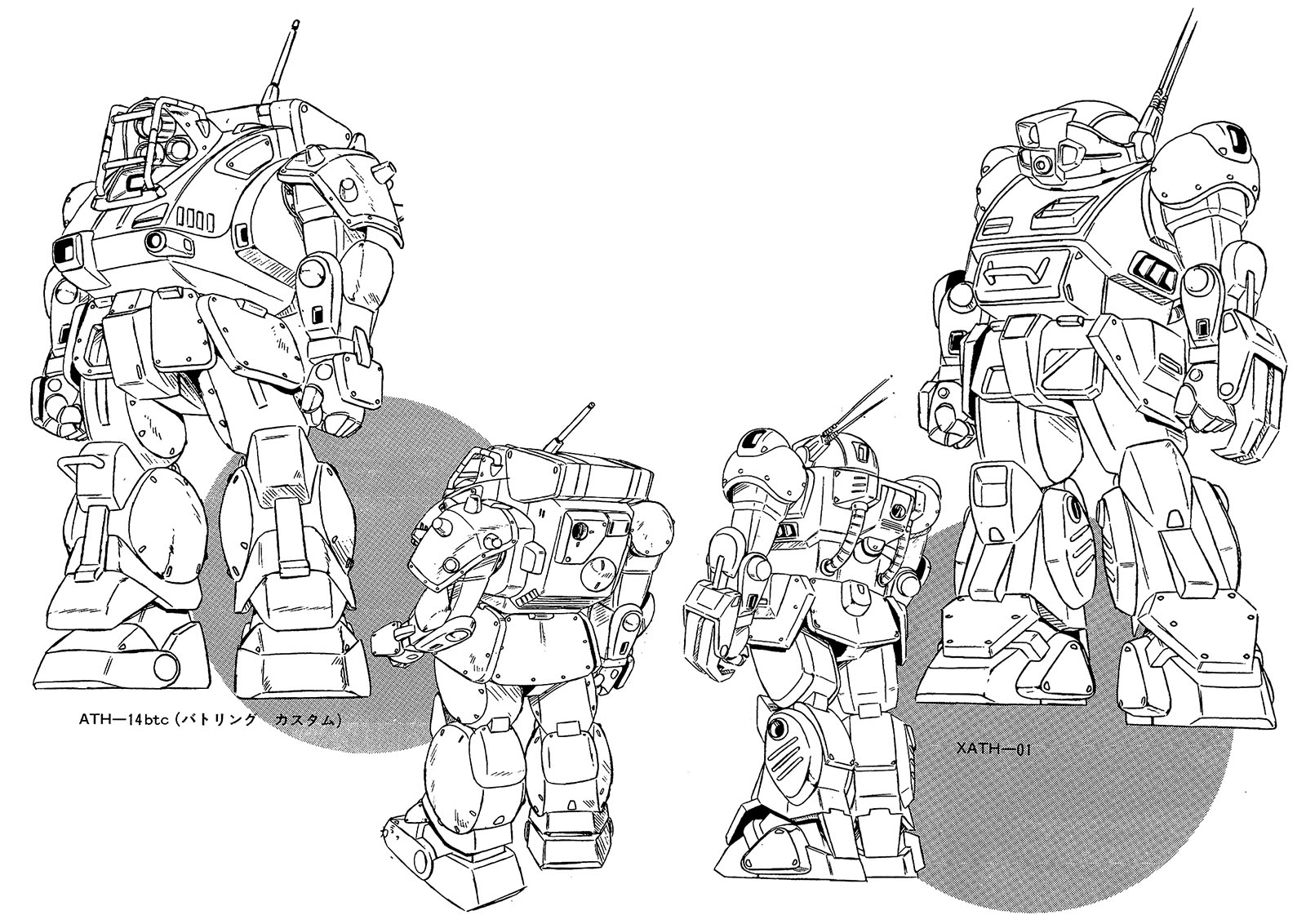
Left: ATH-14BTC (Battling Custom)
The ATH-14ST, which excelled in overall performance, was also widely used for battling after the armistice, often supplied as a “visitor A.T.” at some arenas. In this case, the continuous operating time was modified to about 30 minutes for battling matches. Its built-in machine gun was replaced by sensors and other equipment unless it was used for “Real Battle” matches.
Right: XATH-01
Prototype of the Strikedog A.T. for P.S. made by the Secret Society. It has arms combining a standard arm punch and an iron claw. It has the power to overwhelm other A.T.’s in overall performance. A legendary A.T. that only appears in “Real Battle.”
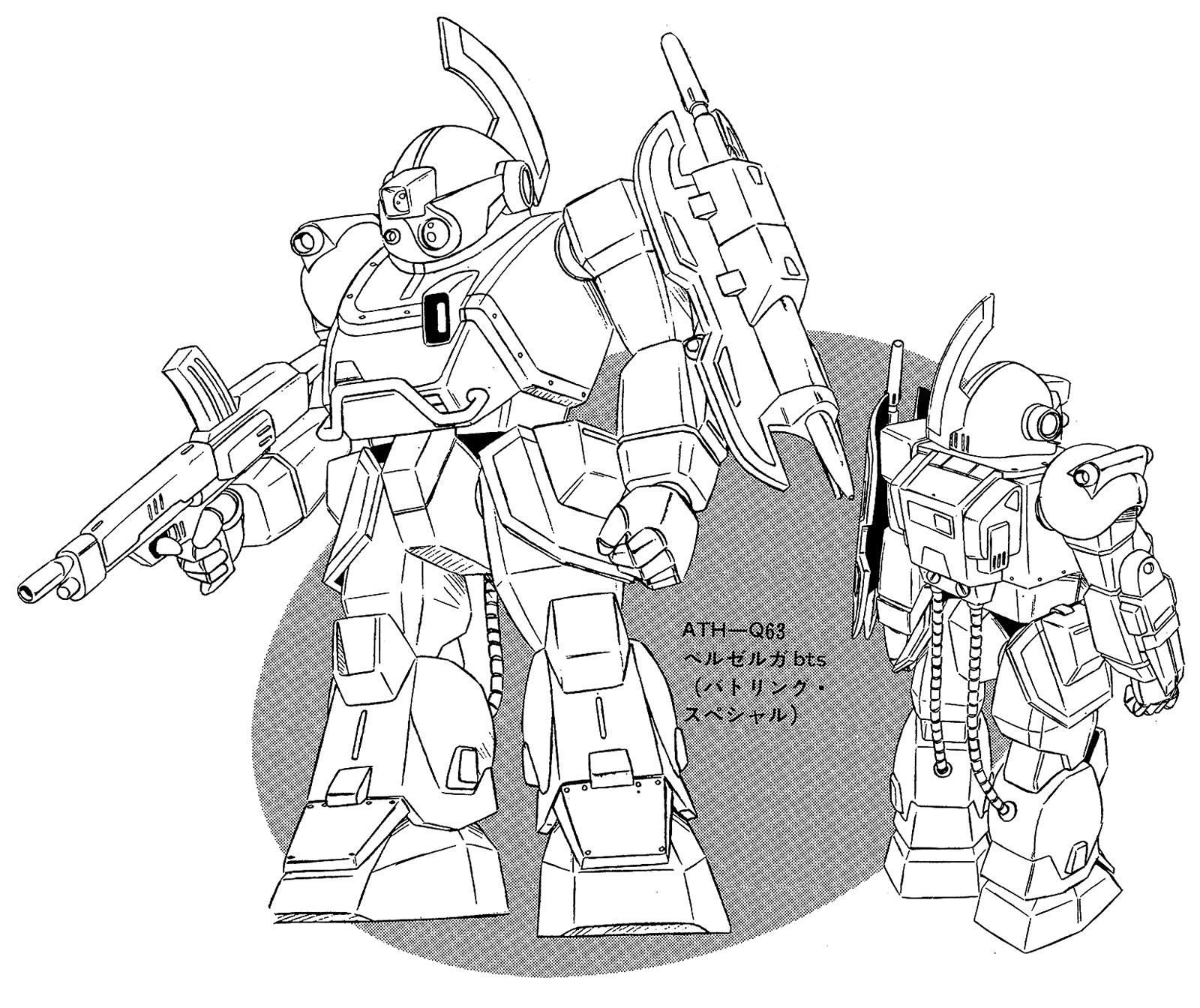
ATH-Q63 Berserga BTS (Battling Special)
An ATH-Q63 modified for battling use. The main body is a land-battle type Berserga, commonly called “fighting custom,” produced just before the armistice. It was equipped with a pile bunker and an electromagnetic induction arm punch, similar to that of the solid shooter, built into each arm. The arm punch used two rounds of conventional gunpowder. It had extraordinary combat power thanks to added tune-ups for Battling.
This machine, commonly called “Blue Knight,” was a type of ATH-Q63 with a composite sensor on the right shoulder and a polymer ringer liquid reaction enhancer “hyper charger” on the back, which was not a PRSP pack. The hyper charger increased the output of the MC and the gliding wheel by 40%. However, it could only be used about twice every 30 minutes because it prevented the polymer ringer fluid from recovering. Also, the equipment was not constant, changing from match to match.

This issue of Dual Magazine featured the first installment of Blue Knight Berserga Story, a serial that lasted for two more issues before being expanded into a much larger Votoms side story. Time limits prevent me from translating it here, but I’ll get to the novels themselves in the future. Believe me, I want to read it as much as you do. – Tim
Left side: A.T. Technology column. Right side: continuation of Votoms encyclopedia from issue 9
A.T. Technology
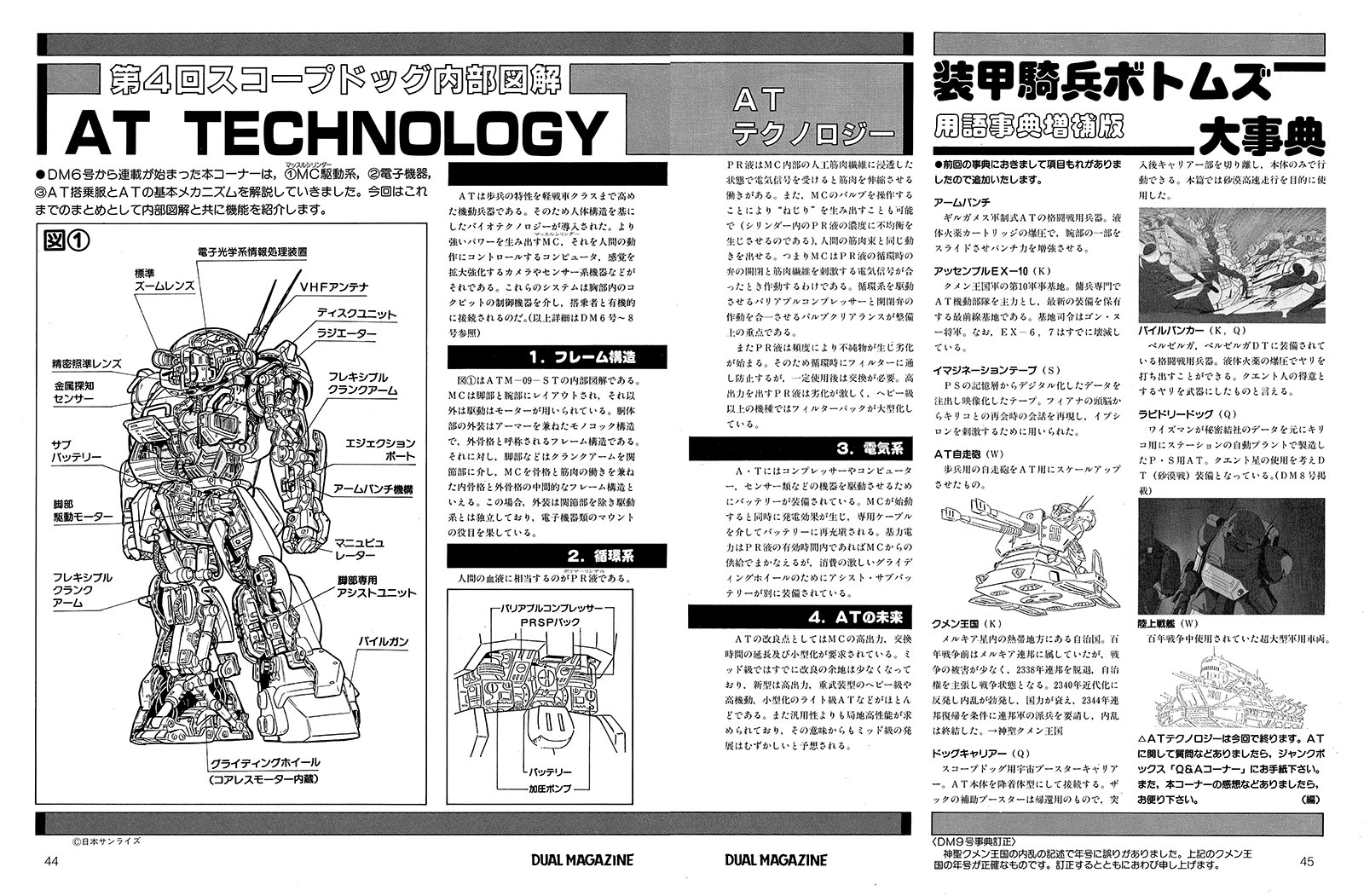
No. 4 Scopedog Internal Illustration
In this corner, which has been serialized since DM No. 6, we explain (1) the MC drive system, (2) electronic equipment, (3) A.T. boarding suit and basic A.T. mechanisms. Here, we will introduce the functions of the A.T. with internal illustrations as a summary.
The A.T. is a mobile weapon with the characteristics of an infantryman raised to the level of a light tank. Therefore, biotechnology based on the human body structure was introduced. Examples include muscle cylinders that generate power, a computer that controls humanoid movements, and cameras and sensors to magnify and enhance the senses. These systems are organically connected to the passenger through the cockpit control devices in the chest cavity.
(For more details, see DM No. 6 to No. 8)
1. frame structure
Above is an internal illustration of the ATM-09-ST. The MCs are laid out in the arms and legs, and motors are used to drive the rest of the parts. The exterior of the fuselage is a monocoque structure that also serves as armor. It is a frame structure called an exoskeleton.
On the other hand, the legs and other parts of the body have crank arms at the joints. The MC is an intermediate frame structure between the endoskeleton and the exoskeleton that functions as both bones and muscles. In this case, the exterior is independent of the drive system except for the joints, and serves as a mount for electronic devices.
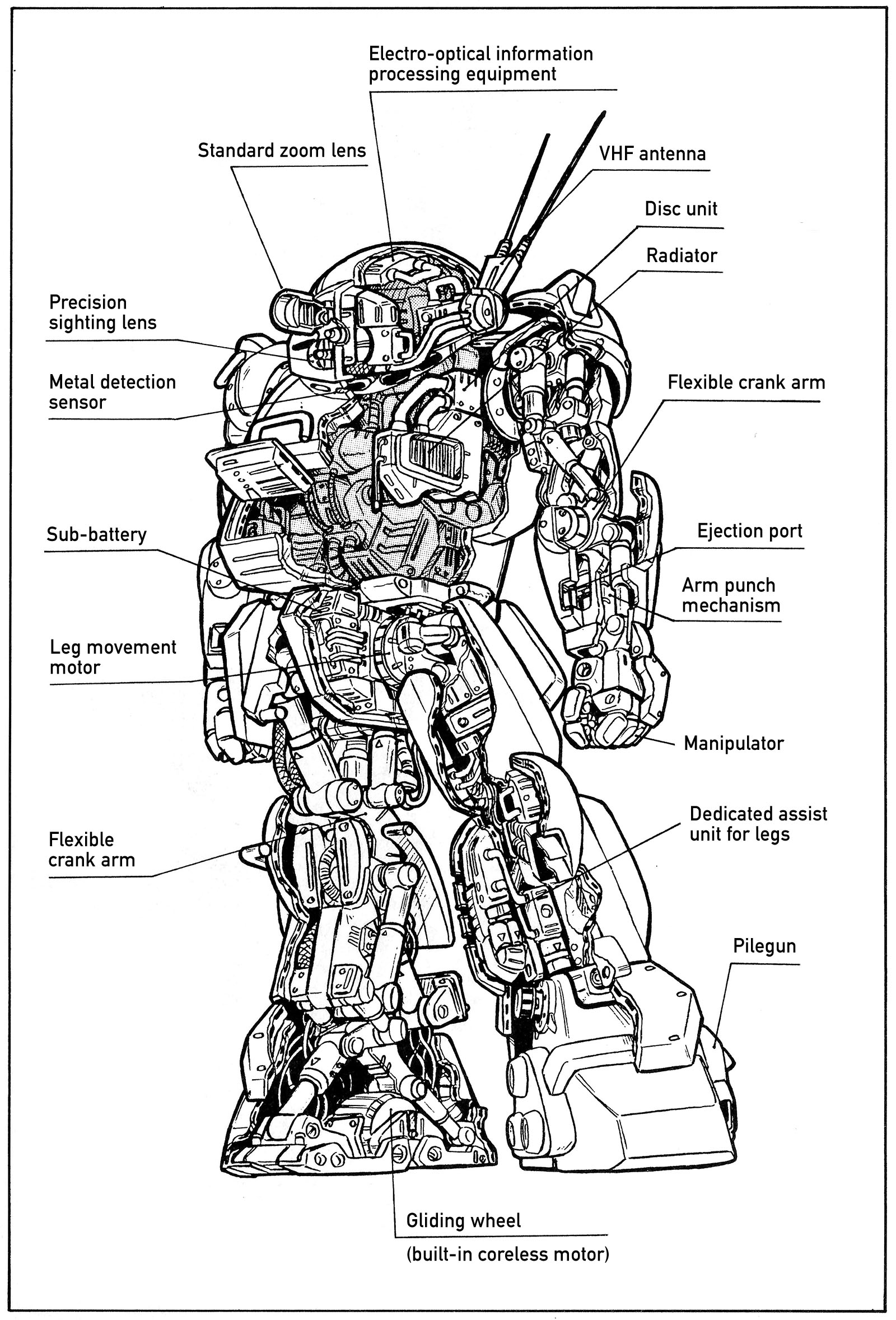
2. Circulatory system
Polymer Ringer (PR) fluid corresponds to human blood. It permeates the artificial muscle fibers inside the MC and causes the muscles to expand and contract when they receive electrical signals. It is also possible to generate “torsion” by manipulating the bulb of the MC (creating an imbalance in the concentration of PR fluid in the cylinder) and can produce movements similar to human muscle bundles.
In other words, the MC is activated when the opening and closing of the valves during the circulation of PR fluid is matched with an electrical signal that stimulates the muscle fibers. The key point in maintenance is the variable compressor that drives the circulation system and the opening and closing of valves.
In addition, PR fluid becomes impure over time and begins to deteriorate. It can be passed through a filter during circulation, but must be replaced after a certain period of use. PR fluid that produces high output deteriorates rapidly. Thus, filter packs become larger for the heavy class and above.
3. electrical system
An A.T. is equipped with a battery to drive devices such as compressors, computers, and sensors. When the MC is started, power is generated and the battery is recharged via a dedicated cable. An assist sub-battery is separately equipped for the gliding wheels, which consume a large amount of power.
4. Future of the A.T.
Improvements in the A.T. require higher MC output, longer replacement time, and smaller size. The mid class already has little room for improvement. Most of the new high-output models are heavy class with heavy armament, or light class with high mobility and miniaturization. In addition, localized high performance is required rather than versatility, In this sense, continued development of the mid-class A.T. is expected to be difficult.